
Conexión de Arduino Uno con acelerometro ADXL335
30 Apr 2017El acelerómetro ADXL335 es un sensor muy útil y fácil de usar para variados proyectos. Tiene un rango de +-3g , lectura en 3 ejes (x,y,z) y un precio bastante económico.
El diagrama de conexión con el Arduino Uno es el siguiente:
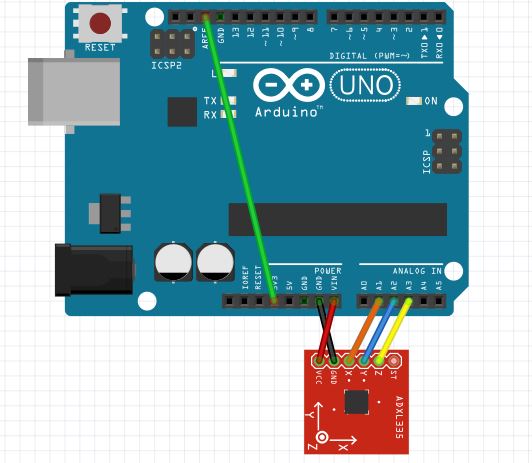
Las conexiones son simples y lo único que merece explicación es el enlace del pin AREF con el de 3.3V. Este es el voltaje máximo de referencia al hacer la conversión de análogo a digital que debe hacer el Arduino Uno. Al tener un rango de 10bit, cuando al acelerómetro envié 3.3V se nos devolverá el valor de 1023 y cuando sea 0V el valor de 0.
El codigo
El código se encarga de hacer la lectura análoga de los 3 ejes en los pines A1, A2 Y A3. Con estos valores se hace la conversión a G (aceleración de gravedad) y luego envía esos datos a través del puerto serial.
int val = 0;
int xpin = A1;
int ypin = A2;
int zpin = A3;
int t_muestreo = 500; // Tiempo de muestreo del acelerómetro
void setup()
{
Serial.begin(9600);
analogReference(EXTERNAL); // La tensión aplicada en el pin AREF (3.3V) será la que haga que el conversor analogo-digital
// de su máxima lectura (1023)
pinMode(xpin, INPUT);
pinMode(ypin, INPUT);
pinMode(zpin, INPUT);
}
void loop()
{
int x = analogRead(xpin); // Leemos el valor de la tensión en el pin x
delay(1); // Esperamos 1 ms a leer en el próximo pin
int y = analogRead(ypin); // Leemos el valor de la tensión en el pin y
delay(1); // Esperamos 1 ms a leer en el próximo pin
int z = analogRead(zpin);
// Una conversión analogo a digital va de 0 a 1023, siendo 512
// la mitad del rango y por lo tanto el 0
float zero_G = 512.0;
// Según el Datasheet, tenemos incrementos de 330mV por cada G de aceleración
// por lo tanto, si pasamos de mV (330) a cuentas (1023)
// nos queda que 1023cuentas/( 3.3V/330mV) = 102.3, valor para convertir mV a G's
// escala es el número de unidades que esperamos que el sensor lea cuando
// hay un cambio de aceleración en 1G
float escala = 102.3;
Serial.print(((float)x - zero_G)/escala);
Serial.print("\t");
Serial.print(((float)y - zero_G)/escala);
Serial.print("\t");
Serial.print(((float)z - zero_G)/escala);
Serial.print("\n");
// delay entre cada lectura
delay(t_muestreo);
}Cualquier consulta o comentario más abajo!